给定序列数据集 和用户指定的最小支持度阈值 minsup,则序列模式发现的任务是找出支持度大于或等于 minsup 的所有序列。
序列模式
当前的大数据中许多数据都是具有固有的序列特征,即事件之间是基于时间或空间的先后次序。例如购物篮数据通常包含商品何时被顾客购买的时间信息。迄今为止,我们在前面的章节中所讨论的关联模式概念都只强调同时出现关系,而忽略数据中的序列信息。对于识别动态系统的重现特征,或者预测特定时间的未来发生,序列信息可能是非常有价值的。
本章将给出序列模式的基本概念和发现序列模式的算法。
预备知识
| 对象 | 时间戳 | 事件 |
|---|---|---|
| A | 10 | 2,3,5 |
| A | 20 | 1,6 |
| A | 23 | 1 |
| B | 11 | 4,5,6 |
| B | 17 | 2 |
| B | 21 | 1,2,7,8 |
| C | 14 | 1,6 |
| C | 28 | 1,7,8 |
表 7.1:序列数据举例
- 序列
一般地,序列是 元素 ( 事务 ) 的有序列表,记作 ,其中每个 是一个或多个事件的集族。
例子
web 站点访问者访问 web 页面序列:
<{首页} {电子产品} {相机和摄像机} {数码项集} {购物车} {订购确认} { 返回购物}>
计算机专业学生在不同的学期参加课程的序列:
<{算法与数据结构, 操作系统导论} {数据库系统, 计算机体系结构} {计算机网络, 软件工程} {计算机图形学, 并行程序设计}>
序列的长度对应序列中的元素个数,包含 k 个事件的序列被称为 k-序列。
- 子序列。
若通过删去 中的一些事件或者删除 中的一些元素能推导出 ,则称 为 的 子序列 ( subsequence )。形式上讲,如果存在整数 ,使得 ,则序列 是序列 的子序列。如果 是 的序列,则称 包含 在 中。
| 序列数据 | 序列数据 | 是否为 的子序列 |
|---|---|---|
| <{2,4}{3,5,6}{8}> | <{2}{3,6}{8}> | 是 |
| <{2,4}{3,5,6}{8}> | <{2}{8}> | 是 |
| <{1,2}{3,4}> | <{1}{2}> | 否 |
| <{2,4}{2,4}{2,5}> | <{2}{4}> | 是 |
表 7.2:子序列概念例子
序列模式发现
设 是包含一个或多个 数据序列 ( data sequence ) 的数据集。数据序列是指与单个数据对象相关联的事件的有序列表。例如 表 5.1 中共有 3 个数据序列,对象 A、B、C 各一个。
序列 的支持度是包含 的所有数据序列所占的比例。如果序列 的支持度大于或等于用户指定的最小支持度阈值,则称 是一个序列模式 ( 或频繁序列 ) 。
由于以下的三个原因,相较于候选项集,候选序列的数量是远远多于候选项集的。
- 一个项在项集中只会出现一次,但是在序列中可能会多次出现。
- 次序在序列中是重要的,项集和序列的区别相当于组合变排序。
- 对于序列数据,n 个不同的项的候选项集数量上限为 ,但是仅仅 2 个不同事件产生的序列可能数量都相当多。
下面给出类 Apriori 算法从序列数据集中提取序列模式。
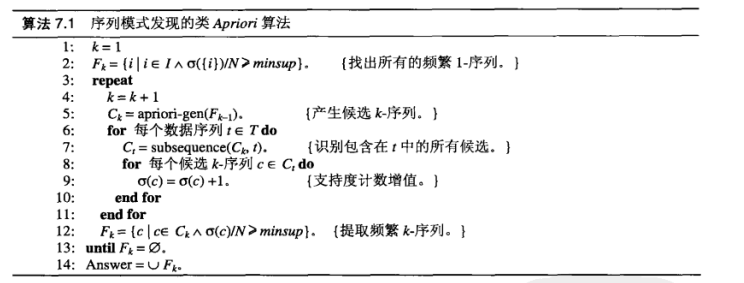
该算法的结构几乎和前面提到的用于频繁项集发现的 Apriori 算法 完全一样。该算法迭代产生新的候选 k-序列,剪掉那些子集中有非频繁 ( k-1 ) -序列的候选,然后对留下的候选计数,识别序列模式。
候选生成
序列的生成和候选项集不同。前面我们通过项集内部的元素使用字典序排序来避免重复产生候选,但是序列本身可能并不符合字典序。合并序列的标准可以用以下过程的形式来表示:
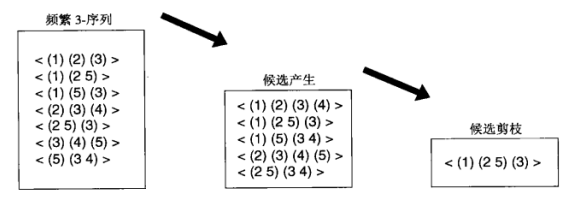
序列 与另一个序列 合并,仅当从 中去掉第一个事件得到的子序列与从 中去掉最后一个事件得到的子序列相同。通过如下方式扩展序列 来得到候选集:
- 如果 的最后一个元素只有一个事件,则将 的最后一个元素合并到 的末尾,得到合并后的序列。
- 如果 的最后一个元素多于一个事件,则将 的最后一个元素的最后一个事件 ( 不被包含在 的最后一个元素 ) 合并到 的最后一个元素,得到合并后的序列。
步骤可见下图:
候选剪枝
如果候选 k-序列的 ( k-1 ) -序列至少有一个是非频繁的,那么将它剪掉。
支持度计数
在计算支持度计数期间,算法将识别属于特定数据序列的所有候选 k-序列,并增加其支持度。在对每个数据序列执行该步骤后,算法将识别出频繁 k-序列,并可以丢弃支持度小于最小支持度阈值 minsup 的候选。
贡献者

更新日志
2026/2/14 03:39
查看所有更新日志